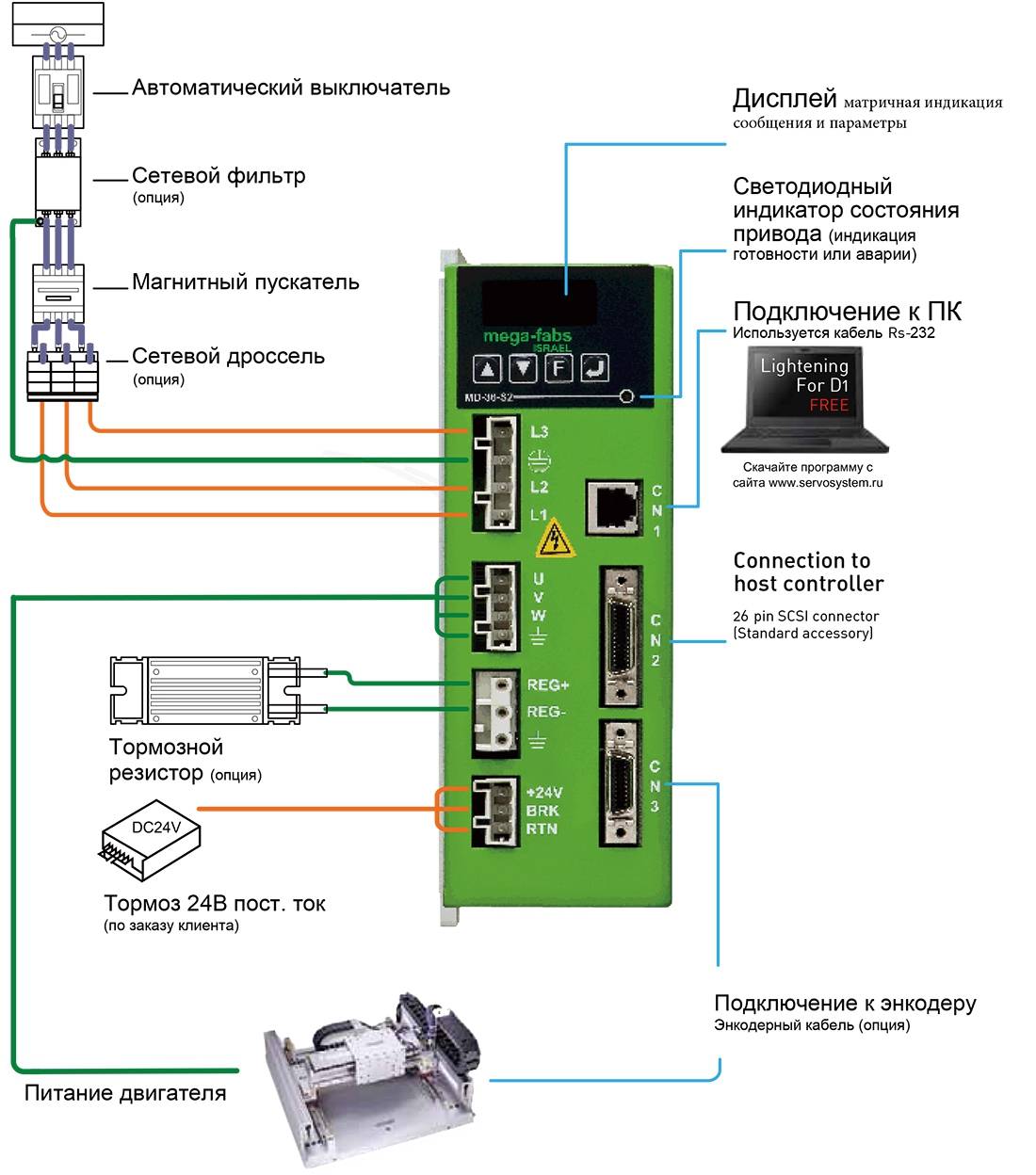
Сервопривод переменного тока
В сервоприводах переменного тока используется синхронный двигатель с мощными постоянными магнитами. В таких двигателях частота вращения ротора совпадает с частотой вращения магнитного поля, наводимого в обмотке статора.
Принцип работы сервопривода на основе трехфазного синхронного электродвигателя состоит в следующем. На обмотки статора поступает трехфазное напряжение, которое создает внутри него вращающееся магнитное поле. Это поле взаимодействует с постоянными магнитами, расположенными в роторе. В результате ротор вращается с частотой магнитного поля.
На валу ротора закреплен энкодер с высокой разрешающей способностью. Сигнал от него поступает по отдельному кабелю на специальный вход сервоусилителя. В то же время на управляющий вход сервоусилителя подается сигнал управления. В результате сравнения этих двух сигналов выделяется сигнал рассогласования, величина которого прямо пропорциональна разнице между целевыми и актуальными показателями вращения двигателя. На основании данного сигнала формируется трехфазное напряжение с такими параметрами, которые обеспечивают максимально быстрое уменьшение рассогласования до нуля.
Как работает сервопривод
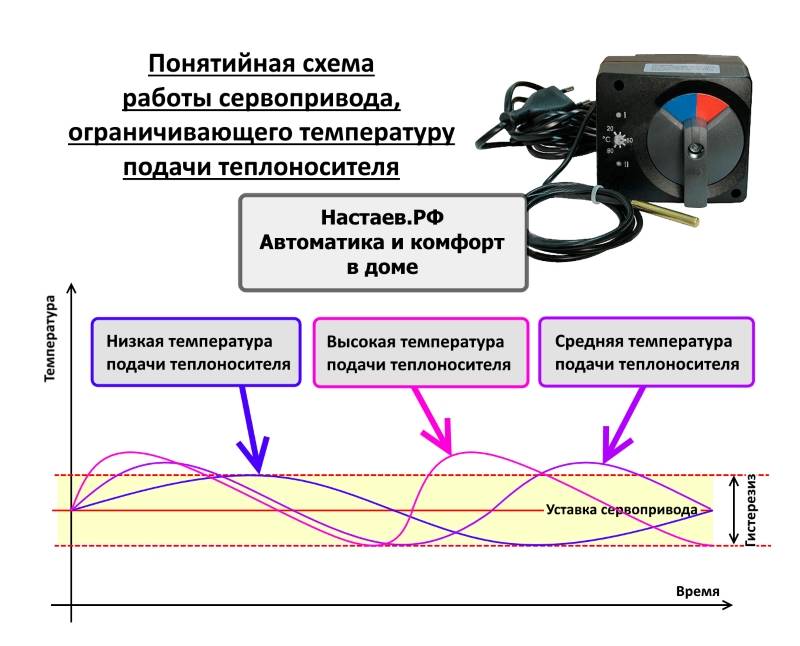
Принцип его действия завязан на использовании импульсного сигнала, обладающего тремя ключевыми свойствами, – частотой, наименьшей и наивысшей продолжительностью, и как раз последняя, то есть длина, и задает угол поворота. Может находиться в диапазоне 0,8-2,2 мс. Как только поступает на печатную плату, активирует энкодер (потенциометр) и, через механическую передачу, выходной вал.
Электронная схема сравнивает реальное положение вала с запрограммированным. При этом возможно 3 состояния. И первое из них – нулевой момент, то есть полного совпадения, что значит – силовой агрегат не работает (остановлен). При втором управляющий сигнал выше опорного, это провоцирует поворот в одну сторону, при третьем – ниже, что оборачивается движением вращающейся части в другом направлении.
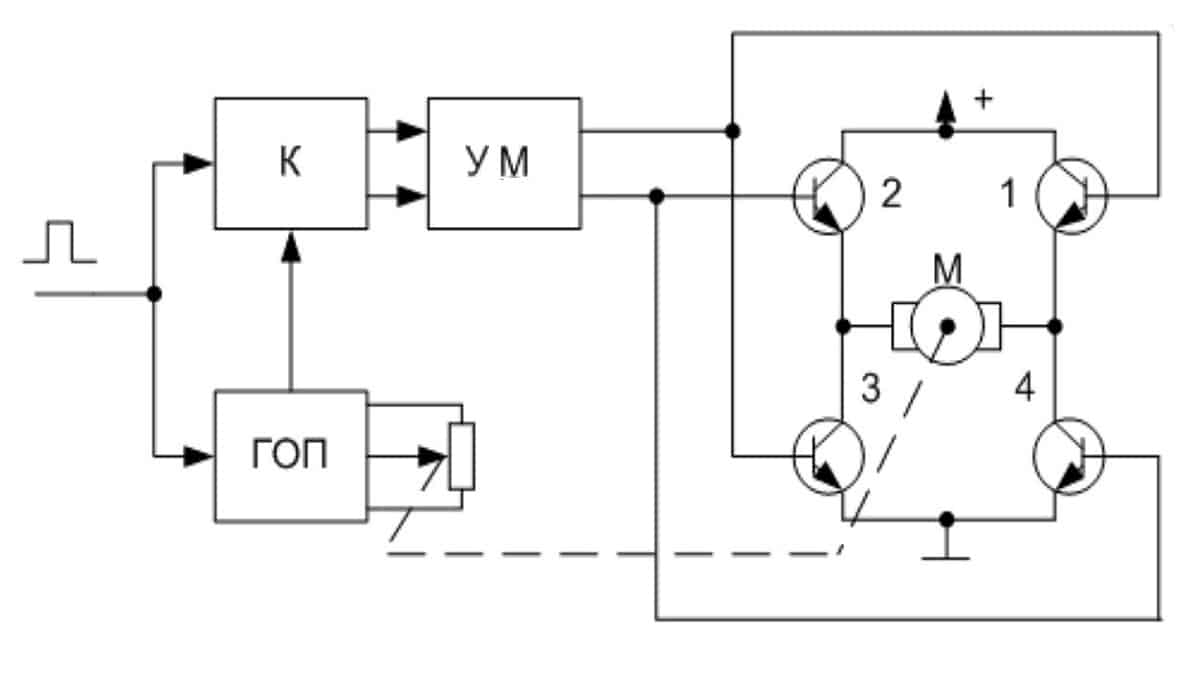
Таким образом, принцип работы сервомотора сводится к следующему:
- привод получает импульс на вход, допустим, команду изменения угла;
- блок управления соотносит полученный сигнал с фактическими значениями, снятыми датчиком;
- исходя из результатов анализа, данная плата выдает команду – перемещения по какому-то вектору, ускорения или замедления, – причем обязательно направленную на то, чтобы привести реальную цифру к заданной и необходимой.
Сравнение осуществляется на основании разностных величин и учитывает параметр длительности, а поэтому определяет разбежку показателей с максимальной точностью. Эта особенность дает возможность обеспечить необходимое позиционирование инструмента.
Режимы управления
Работа сервопривода может осуществляться в трех разных форматах. Рассмотрим каждый из них.
Контроль положения
Здесь нужно сохранять заданный угол поворота вала, подавая последовательность сигналов. Пусть они идут с контроллера – таким образом, можно обеспечить точное позиционирование, что особенно актуально для узлов производственных станков.
Обратите внимание, с помощью совокупности импульсов не проблема задать информацию не только о положении в пространстве, но и о векторе вращения или скорости движения. Сделать это можно одним из трех способов – направляя напряжение:
- со сдвигом фазы на 90 градусов;
- сразу на два входа (SIGN, PULSE – стандартные названия);
- с перемещением по часовой стрелке или против.
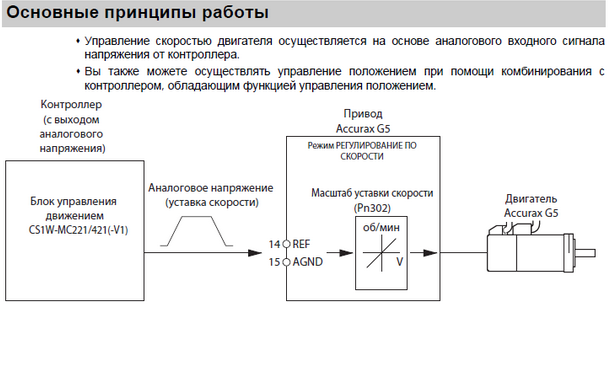
Контроль скорости
Здесь сервоуправление – это увеличение или уменьшение аналогового сигнала на дискретную величину при его подаче на соответствующие обмотки. А если он еще и разнополярный, тогда не составляет труда быстро менять направление вращения.
Данный режим напоминает эксплуатацию асинхронного силового агрегата с преобразователем частоты. Потому что в ее рамках требуется постоянно выполнять разгон и замедление, задавать минимумы и максимумы и тому подобное. Главное – реализовывать не слишком сложный алгоритм, чтобы не превращать рядовую практическую задачу в непосильный труд программирования.
Контроль момента
В данном случае назначение сервопривода – обеспечивать стабильное число оборотов, вне зависимости от того, вращается двигатель или нет. Эта цель достигается путем подачи или дискретного сигнала, или аналогового двухполярного. Метод более чем актуален для оборудования, в процессе эксплуатации требующего смены давления, прижима или других параметров.
Внимание, силовой агрегат должен быть дополнительно оснащен встроенным датчиком тока, ведь именно последний и оценивает значение текущего момента, чтобы потом электроника могла сравнить его с необходимой величиной

Применение [ править | править код ]
Сервоприводы применяются для точного (по датчику) позиционирования (чаще всего) приводимого элемента в автоматических системах:
- управляющие элементы механической системы (заслонки, задвижки, углы поворота)
- рабочие органы и заготовки в станках и инструментах
Сервоприводы вращательного движения используются для:
Сервоприводы линейного движения используются, например, в автоматах установки электронных компонентов на печатную плату.
Серводвигатель
Серводвигатель — сервопривод с мотором, предназначенный для перемещения выходного вала в нужное положение (в соответствии с управляющим сигналом) и автоматического активного удержания этого положения.
Серводвигатели применяются для приведения в движение устройств управляемых поворотом вала — как открытие и закрытие клапанов, переключатели и так далее.
Важными характеристиками сервомотора являются динамика двигателя, равномерность движения, энергоэффективность.
Серводвигатели широко применяются в промышленности, например, в металлургии, в станках с ЧПУ, прессо-штамповочном оборудовании, автомобильной промышленности, тяговом подвижном составе железных дорог.
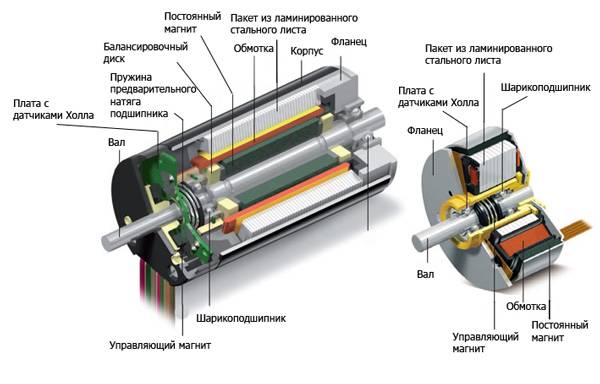
В основном в сервоприводах использовались 3-полюсные коллекторные двигатели, в которых тяжелый ротор с обмотками вращается внутри магнитов.
Первое усовершенствование, которое было применено — увеличение количества обмоток до 5. Таким образом, вырос вращающий момент и скорость разгона. Второе усовершенствование — это изменение конструкции мотора. Стальной сердечник с обмотками очень сложно раскрутить быстро. Поэтому конструкцию изменили — обмотки находятся снаружи магнитов и исключено вращение стального сердечника. Таким образом, уменьшился вес двигателя, уменьшилось время разгона и возросла стоимость.






Ну и наконец, третий шаг — применение бесколлекторных двигателей. У бесколлекторных двигателей выше КПД, так как нет щёток и скользящих контактов. Они более эффективны, обеспечивают большую мощность, скорость, ускорение, вращающий момент.
В конструкциях современного оборудования, создаваемого на базе высоких технологий, постоянно развиваются и совершенствуются различные автоматические процессы. Среди них широкое распространение получил сервопривод, устанавливаемый с целью совершения отдельными элементами и деталями постоянных динамических движений. Эти устройства обеспечивают постоянный контроль над углами поворота вала, устанавливают нужную скорость в приборах электромеханического типа.
Составной частью этих систем являются серводвигатели, которые дают возможность управлять скоростями в нужном диапазоне в установленный промежуток времени. Таким образом, все процессы и движения могут периодически повторяться, а частота этих повторов закладывается в системе управления.
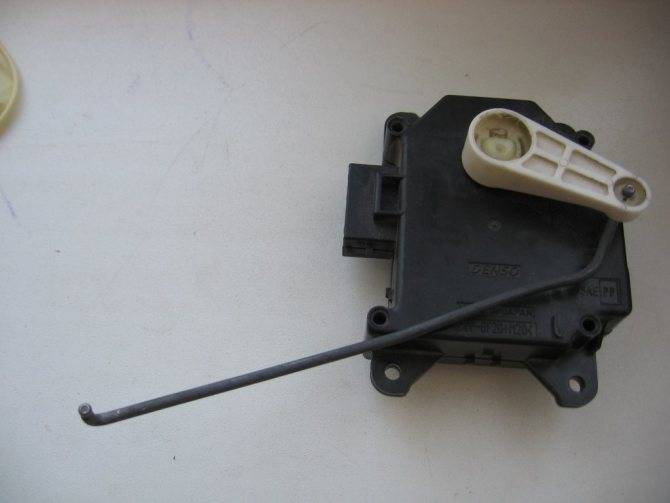
Сервопривод крышки багажника
Современные автомобили большей частью выпускаются с автоматическим открыванием и закрыванием багажника. Для этого требуется установка сервопривода. Производители применяют 2 способа, чтобы обеспечить авто подобной опцией. Надежным вариантом является пневмопривод, но он стоит дороже. Электропривод управляется несколькими способами на выбор:
- с пульта;
- кнопка на дверной панели водителя;
- ручка на крышке багажника.
Ручное открывание не всегда удобное, особенно зимой, когда замок может замерзнуть. Сервопривод багажника совмещается с замком, что дополнительно защищает авто от несанкционированного проникновения.
Устройства применяются на иномарках, но при желании их можно установить на отечественных моделях. Предпочтительно использовать привод с электродвигателем.
Есть еще устройства с магнитными пластинами, но они сложней и применяются реже.
Самыми дешевыми являются электроприборы, предназначенные только для открывания. Можно подобрать привод багажника, состоящий из электродвигателя с инерционным механизмом, отключающийся при возникновении препятствия перемещению. Дорогие модели состоят из устройства подъема и опускания крышки, доводчика запорного механизма, контроллера и датчиков.
Установка и настройка сервопривода крышки багажника производятся на заводе, но простые устройства могут быть установлены своими руками.
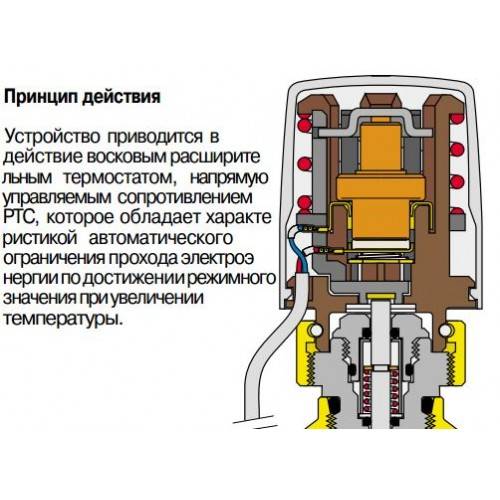
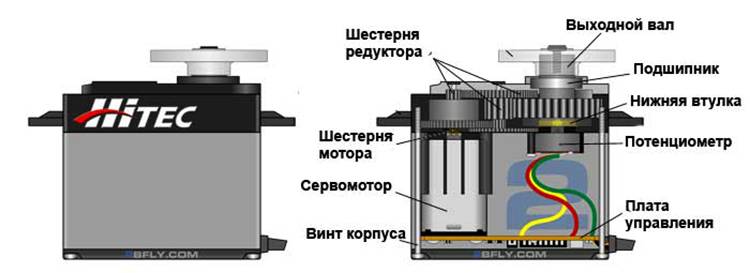
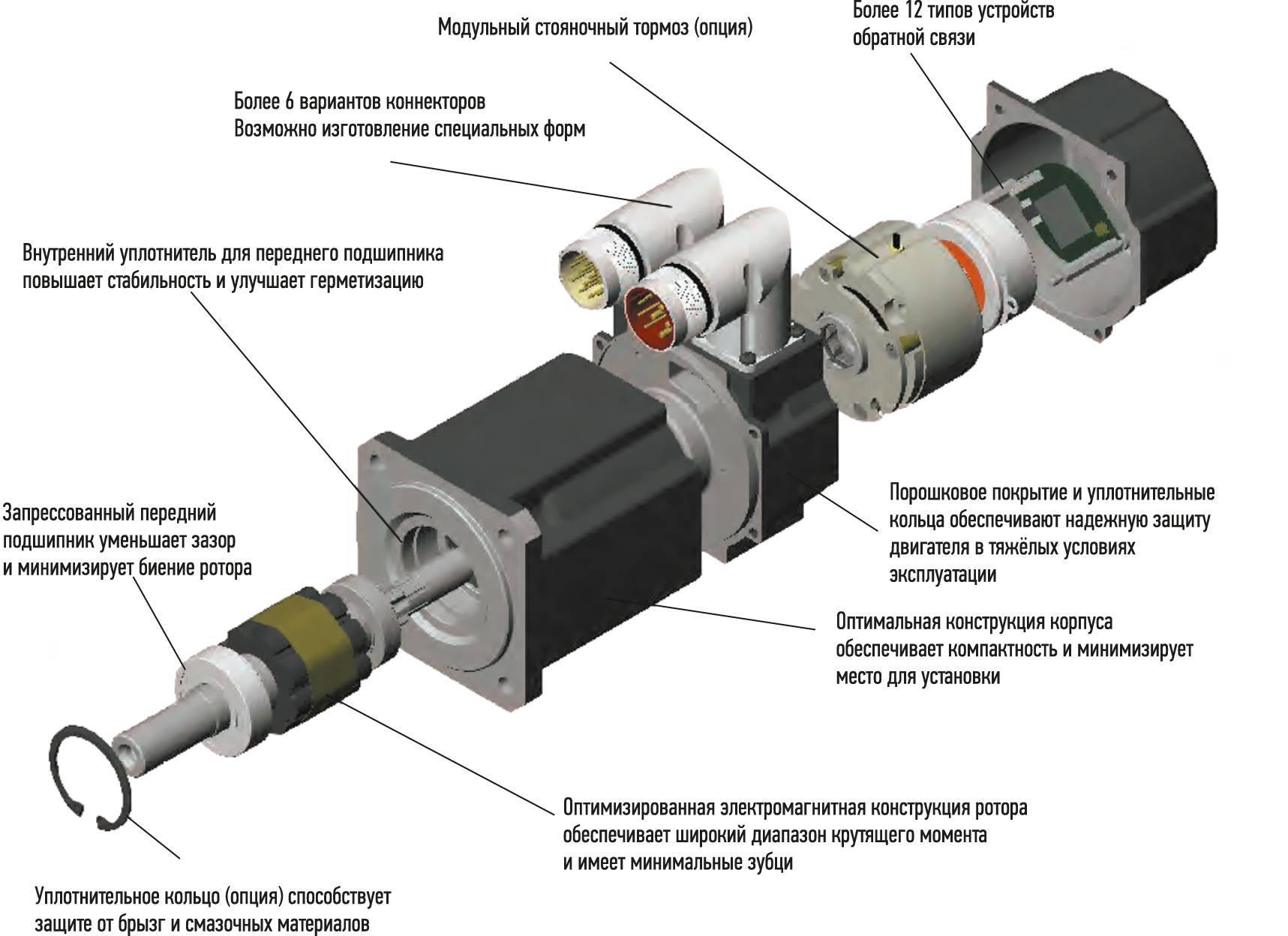
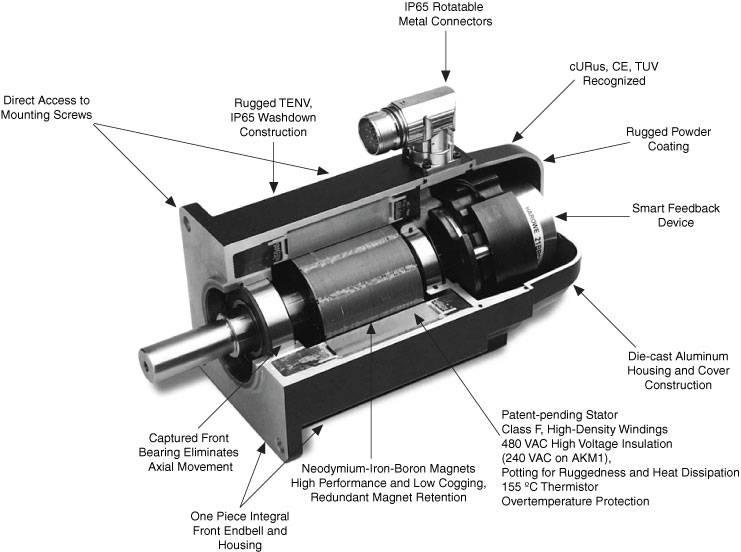
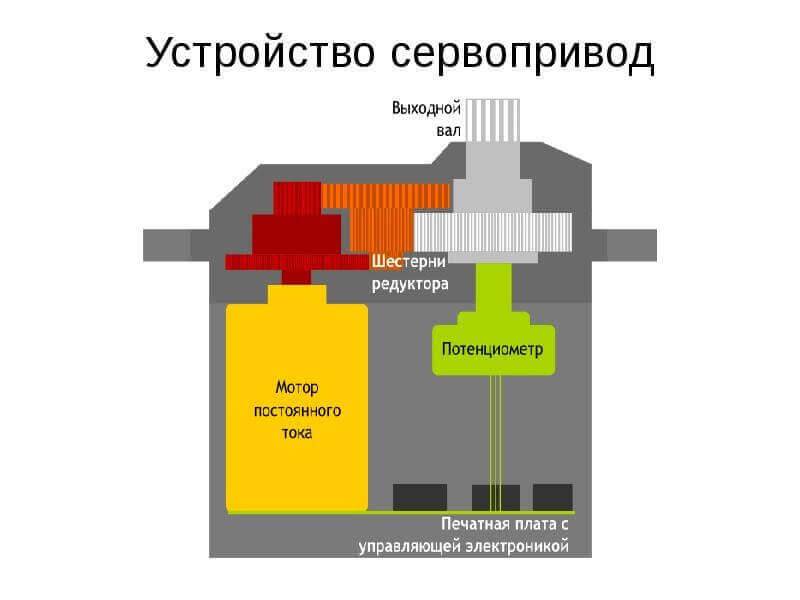
Устройство серводвигателя
В общем случае у него следующие функциональные узлы:
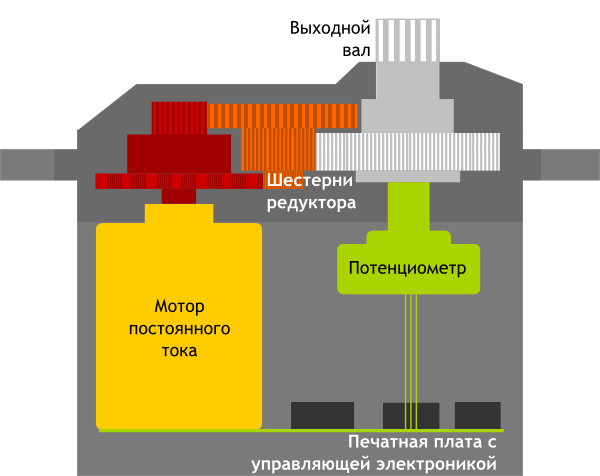
- Сам привод – мотор, превращающий электрическую энергию в механическую (силу поворота); для снижения скорости до необходимой снабжен редуктором, передающим крутящий момент.
- Энкодер – датчик обратной связи, преобразующий угол поворота в управляющий сигнал, контролирующий вращение выходного вала (на последнем закреплен инструмент или какой-то другой орган выполнения действия). Для решения данной задачи также хорошо подходит потенциометр, изменяющий свое сопротивление при перемещении бегунка, причем именно пропорционально, и за счет этого обеспечивающий точное позиционирование.
- Электронная начинка, принимающая входящие параметры, считывающая и сравнивающая значения, выполняющая операции включения/выключения – это тоже то, из чего состоит сервопривод; все ЭРЕ располагаются на печатной плате, которая и помогает поддерживать обратную связь и, по сути, является важнейшей частью двигателя.
- Проводка – подключение питания (два кабеля) и доставка сигнала контроля (еще один), обеспечивающий выставление правильного положения вала, а значит и используемого инструмента.
Данная конфигурация достаточно проста, чтобы обеспечивать бесперебойное поддержание режимов и оставаться надежной. Такого узла, который стал бы «слабым звеном», попросту нет, поэтому проблемы с эксплуатацией возникают сравнительно редко. Продолжительности ресурса также способствует специфика функционирования, к особенностям которой мы переходим.
Виды сервопривода
1. Сервопривод вращательного движения
- Синхронный
- Асинхронный
2. Сервопривод линейного движения
- Плоский
- Круглый
Синхронный сервопривод
— позволяет точно задавать угол поворота (с точностью до угловых минут), скорость вращения, ускорение. Разгоняется быстрее асинхронного, но в разы дороже.
Асинхронный сервопривод
(Асинхронная машина с датчиком скорости) — позволяет точно задавать скорость, даже на низких оборотах.
Линейные двигатели
— могут развивать огромные ускорения (до 70 м/с²).
3. По принципу действия
- Электромеханический
- Электрогидромеханический
У электромеханического сервопривода
движение формируется электродвигателем и редуктором.
У электрогидромеханического сервопривода
движение формируется системой поршень-цилиндр. У данных сервоприводов быстродействие на порядок выше в сравнении с электромеханическими.




Сравнение с шаговым двигателем
Другим вариантом точного позиционирования приводимых элементов без датчика обратной связи является применение шагового двигателя. В этом случае схема управления отсчитывает необходимое количество импульсов (шагов) от положения репера (этой особенности обязан характерный шум шагового двигателя в дисководах 3,5″ и CD/DVD при попытках повторного чтения). При этом точное позиционирование обеспечивается параметрическими системами с отрицательной обратной связью, которые образуются взаимодействующими между собой соответствующими полюсами статора и ротора шагового двигателя. Сигнал задания для соответствующей параметрической системы формирует система управления шаговым двигателем, активизирующая соответствующий полюс статора.
Так как датчик обычно контролирует приводимый элемент, электрический сервопривод имеет следующие преимущества перед шаговым двигателем
- не предъявляет особых требований к электродвигателю и редуктору — они могут быть практически любого нужного типа и мощности (а шаговые двигатели, как правило, маломощны и тихоходны);
- гарантирует максимальную точность, автоматически компенсируя: механические (люфты в приводе) или электронные сбои привода;
- постепенный износ привода, шаговому же двигателю для этого требуется периодическая юстировка;
- тепловое расширение привода (при работе или сезонное), это было одной из причин перехода на сервопривод для позиционирования головок в жестких дисках;
- обеспечивая немедленное выявление отказа (выхода из строя) привода (по механической части или электронике);
большая возможная скорость перемещения элемента (у шагового двигателя наименьшая максимальная скорость по сравнению с другими типами электродвигателей);
затраты энергии пропорциональны сопротивлению элемента (на шаговый двигатель постоянно подаётся номинальное напряжение с запасом по возможной перегрузке);
Недостатки в сравнении с шаговым двигателем
- необходимость в дополнительном элементе — датчике;
- сложнее блок управления и логика его работы (требуется обработка результатов датчика и выбор управляющего воздействия, а в основе контроллера шагового двигателя — просто счётчик);
- проблема фиксирования: обычно решается постоянным притормаживанием перемещаемого элемента либо вала электродвигателя (что ведёт к потерям энергии) либо применение червячных/винтовых передач (усложнение конструкции) (в шаговом двигателе каждый шаг фиксируется самим двигателем).
- сервоприводы, как правило, дороже шаговых.
Сервопривод, однако, возможно использовать и на базе шагового двигателя или в дополнение к нему до некоторой степени совместив их достоинства и устранив конкуренцию между ними (сервопривод осуществляет грубое позиционирование в зону действия соответствующей параметрической системы шагового двигателя, а последняя осуществляет окончательное позиционирование при относительно большом моменте и фиксации положения).
ЗЫ:
Проблемы фиксирования никакой нет в сервоприводе в отличие от шагового. Высокоточное позиционирование и удержание в заданной позиции обеспечивается работой электрической машины в вентильном режиме, суть которого сводится к её работе в качестве источника силы. В зависимости от рассогласования положения (и других координат электропривода) формируется задание на силу. При этом несомненным преимуществом сервопривода является энергоэффективность: ток подается только в том необходимом для того объеме, чтобы удержать рабочий орган в заданном положении. В противоположность шаговому режиму, когда подается максимальное значение тока, определяющее угловую характеристику машины. Угловая характеристика машины аналогична при малых отклонениях механической пружине, которая пытается «притянуть» рабочий орган в нужную точку. В шаговом приводе чем больше рассогласование положения, тем больше сила при неизменном токе.
Исходный код программы на языке С (Си) с пояснениями
Представленный здесь код программы для микроконтроллера Atmega16 предназначен для вращения сервомотора с 00 до 1800 и возвращения назад с 1800 до 00. Это перемещение будет осуществлено за ряд последовательных шагов – 0 – 45 – 90 – 135 – 180 – 135 – 90 – 45 – 0. Чтобы задействовать функции задержки в программе мы будем использовать внутреннюю библиотеку Atmel Studio под названием <util/delay.h>.
C++
#define F_CPU 1000000UL
#include<avr/io.h>
#include<util/delay.h>
void main()
{
//конфигурируем TIMER1
TCCR1A|=(1<<COM1A1)|(1<<COM1B1)|(1<<WGM11); //NON Inverted PWM – не инвертированная ШИМ
TCCR1B|=(1<<WGM13)|(1<<WGM12)|(0<<CS11)|(1<<CS10); //PRESCALER=1 MODE 14(FAST PWM)
ICR1=19999; //fPWM=50Hz – эта частота получается из периода следования импульсов, равному 20 мс
DDRD|=(1<<PD4)|(1<<PD5); //конфигурируем контакты PWM на вывод данных
while(1)
{
OCR1A=0; //0 degree
_delay_ms(1000);
OCR1A=600; //45 degree
_delay_ms(1000);
OCR1A=950; //90 degree
_delay_ms(1000);
OCR1A=1425; //135 degree
_delay_ms(1000);
OCR1A=1900; //180 degree
_delay_ms(1000);
OCR1A=1425; //135 degree
_delay_ms(1000);
OCR1A=950; //90 degree
_delay_ms(1000);
OCR1A=650; //45 degree
_delay_ms(1000);
}
}
1 | #define F_CPU 1000000UL voidmain() { TCCR1A|=(1<<COM1A1)|(1<<COM1B1)|(1<<WGM11);//NON Inverted PWM – не инвертированная ШИМ TCCR1B|=(1<<WGM13)|(1<<WGM12)|(<<CS11)|(1<<CS10);//PRESCALER=1 MODE 14(FAST PWM) ICR1=19999;//fPWM=50Hz – эта частота получается из периода следования импульсов, равному 20 мс DDRD|=(1<<PD4)|(1<<PD5);//конфигурируем контакты PWM на вывод данных while(1) { OCR1A=;//0 degree _delay_ms(1000); OCR1A=600;//45 degree _delay_ms(1000); OCR1A=950;//90 degree _delay_ms(1000); OCR1A=1425;//135 degree _delay_ms(1000); OCR1A=1900;//180 degree _delay_ms(1000); OCR1A=1425;//135 degree _delay_ms(1000); OCR1A=950;//90 degree _delay_ms(1000); OCR1A=650;//45 degree _delay_ms(1000); } |
Описание
Сервоприводом является любой тип механического привода (устройства, рабочего органа), имеющий в составе датчик (положения, скорости, усилия и т. п.) и блок управления приводом (электронную схему или механическую систему тяг), автоматически поддерживающий необходимые параметры на датчике (и, соответственно, на устройстве) согласно заданному внешнему значению (положению ручки управления или численному значению от других систем).
Проще говоря, сервопривод является «автоматическим точным исполнителем» — получая на вход значение управляющего параметра (в режиме реального времени), он «своими силами» (основываясь на показаниях датчика) стремится создать и поддерживать это значение на выходе исполнительного элемента.
К сервоприводам, как к категории приводов, относится множество различных регуляторов и усилителей с отрицательной обратной связью, например, гидро-, электро-, пневмоусилители ручного привода управляющих элементов (в частности, рулевое управление и тормозная система на тракторах и автомобилях), однако термин «сервопривод» чаще всего (и в данной статье) используется для обозначения электрического привода с обратной связью по положению, применяемого в автоматических системахдля привода управляющих элементов и рабочих органов .
Сервоприводы в настоящее время применяются в высокопроизводительном оборудовании следующих отраслей: машиностроение; автоматические линии производства: напитков, упаковки, стройматериалов, электроники и т. д., подъемно-транспортная техника; полиграфия; деревообработка, пищевая промышленность.[источник не указан 404 дня
Сервопривод[]
Что такое сервопривод?
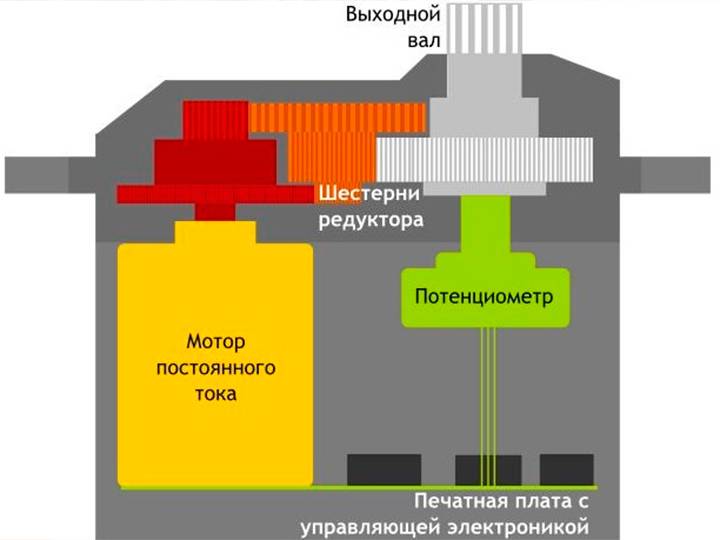
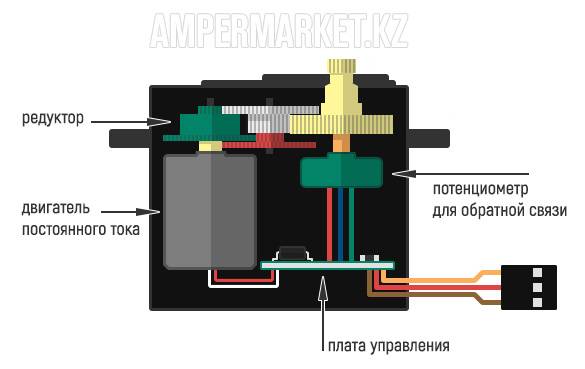
Сервопривод — это, по сути, мотор, положением вала которого мы можем управлять. От обычного мотора он отличается тем, что ему можно точно в градусах задать положение, в которое встанет вал. Сервоприводы используются для моделирования различных механических движений роботов.Сервопривод состоит из двигателя постоянного тока, шестеренного редуктора, потенциометра и электронной схемы.
- Сервопривод получает на вход значение управляющего параметр, например, угол поворота.
- Блок управления сравнивает это значение со значением на своём датчике.
- На основе результата сравнения привод производит некоторое действие, например: поворот, ускорение или замедление так, чтобы значение с внутреннего датчика стало как можно ближе к значению внешнего управляющего параметра
Наиболее распространены сервоприводы, которые удерживают заданный угол и сервоприводы, поддерживающие заданную скорость вращения.
Распиновка
| Провод | Назначение |
|---|---|
| Черный | Земля |
| Красный | +5V |
| Оранжевый/Желтый | Управляющий сигнал |
Схема подключения сервопривода к Arduino обычно следующая: черный провод присоединяем к GND, красный провод присоединяем к 5V, желтый провод к цифровому пину. Управление сервоприводом на Arduino достаточно просто, но по углам поворота сервомоторы бывают на 180° и 360°, что следует учитывать при выборе привода.
Краткая справка о библиотеках
- Библиотеки добавляют дополнительную функциональность скетчам, например, при работе с аппаратной частью или при обработке данных. Существует огромное количество библиотек для различного рода датчиков, сенсоров и прочих устройств. Обычно библиотека содержит в себе набор дополнительных команд для работы с ними, что упрощает написание программ. Для использования библиотеки необходимо выбрать меню Скетч > Подключить библиотеку. Одна или несколько директив #include будут размещены в начале кода скетча с последующей компиляцией библиотек и вместе со скетчем. Загрузка библиотек требует дополнительного места в памяти Arduino. Неиспользуемые библиотеки можно удалить из скетча убрав директиву #include.
- Пример:
#include <Servo.h> //подключение библиотеки для работы с сервоприводами #include <Stepper.h> //подключение библиотеки для работы с шаговыми двигателями #include <EEPROM.h> //подключение библиотеки для работы с энергонезависимой памятью
Чтобы управлять сервоприводом существует библиотека Servo.h, которая обладает набором команд для работы с сервоприводами. Чтобы работать с этой библиотекой, прежде всего нужно создать переменную, а точнее объект, типа Servo, обладающую уникальным именем. Все последующие команды будут в формате Имя.команда(). Таким образом к одной Arduino можно подключить несколько сервоприводов и управлять ими одновременно. Основные команды приведены в таблице:
| Команда | Назначение | Пример |
|---|---|---|
| Servo название привода; | Создание переменной типа Servo | Servo Motor1; |
| ИмяСерво.attach(номер пина); | Привязывание мотора к управляющему пину | Motor1.attach(6); |
| ИмяСерво.write(угол); | Задание угла для сервы от 0 до 180. | Motor1.write(90); |
| ИмяСерво.read(); | Считывание последнего положения сервы. | int angle = Motor1.read(); |
Ниже представлен пример кода:
#include <Servo.h> //используем библиотеку для работы с сервоприводом
Servo myservo; //объявляем переменную myservo типа Servo
void setup() //процедура setup
{
myservo.attach(10); //привязываем привод к порту 10
}
void loop() //процедура loop
{
myservo.write(); //ставим вал под 0
delay(2000); //ждем 2 секунды
myservo.write(180); //ставим вал под 180
delay(2000); //ждем 2 секунды
}
Основные характеристик изделия
Работа сервопривода характеризуется двумя основными показателями: скоростью поворота и усилия на валу. Первая величина служит показателем времени, которое измеряется в секундах. Усилие мерится в кг/см, то есть, какой уровень усилия развивает механизм от центра вращения.
Вообще данный параметр находится в зависимости от основного назначения устройства, а уже потом от числа передач редуктора и используемых в устройстве узлов.
Как уже упоминалось, сейчас выпускают механизмы, функционирующие при показателе напряжения питания от 4,8 до 6 В. Чаще этот показатель равен 6 В. Однако не все модели рассчитаны на широкий диапазон напряжений. Иногда двигатель сервопривода работает лишь при 4,8 В или же только при 6 В (последние конфигурации производятся крайне редко).